|
|

|

|
| e-Pub |
Section: New Results
Motion-planning in human-populated environment
We explore motion planning algorithms to allow robots/vehicles to navigate in human populated environment, and to predict human motions.
We have proposed a novel planning-based motion prediction approach [27] which addresses the weaknesses of the previous state-of-the-art motion prediction technique [56], namely High computational complexity and Limited ability to model the temporal evolution along the predicted path. In 2016, this work has evolved in two new directions, which are prediction of pedestrian behaviors in urban environments and mapping of human flows. We also started to investigate the navigation of a telepresence robot in collaboration with the GIPSA Lab. These work are presented here after.
Urban Behavioral Modeling
Participants : Pavan Vasishta, Raphael Frisch, Anne Spalanzani.
The objective of modeling urban behavior is to predict the trajectories of pedestrians in towns and around car or platoons. We aim to integrate various entities of urban environments such as crosswalks, sidwalks, points of interest, but also characteristics of mobile obstacles (such cars and platoons) and proxemics in order to build a costmap that will show how pedestrians are driven around the ego-vehicle. This work is in the scope of the VALET project and the PhD of Pavan Vasishta (in collaboration with the Inria team Pervasive Interaction). It started in february 2016. Furthermore, a collaboration with the Laboratory of Psychology and NeuroCognition of Grenoble has been initiated to ground interaction and personal space models in experimental data from psychology.
|
Modeling human-flows from robot(s) perception
Participants : Olivier Simonin, Jacques Saraydaryan, Fabrice Jumel.
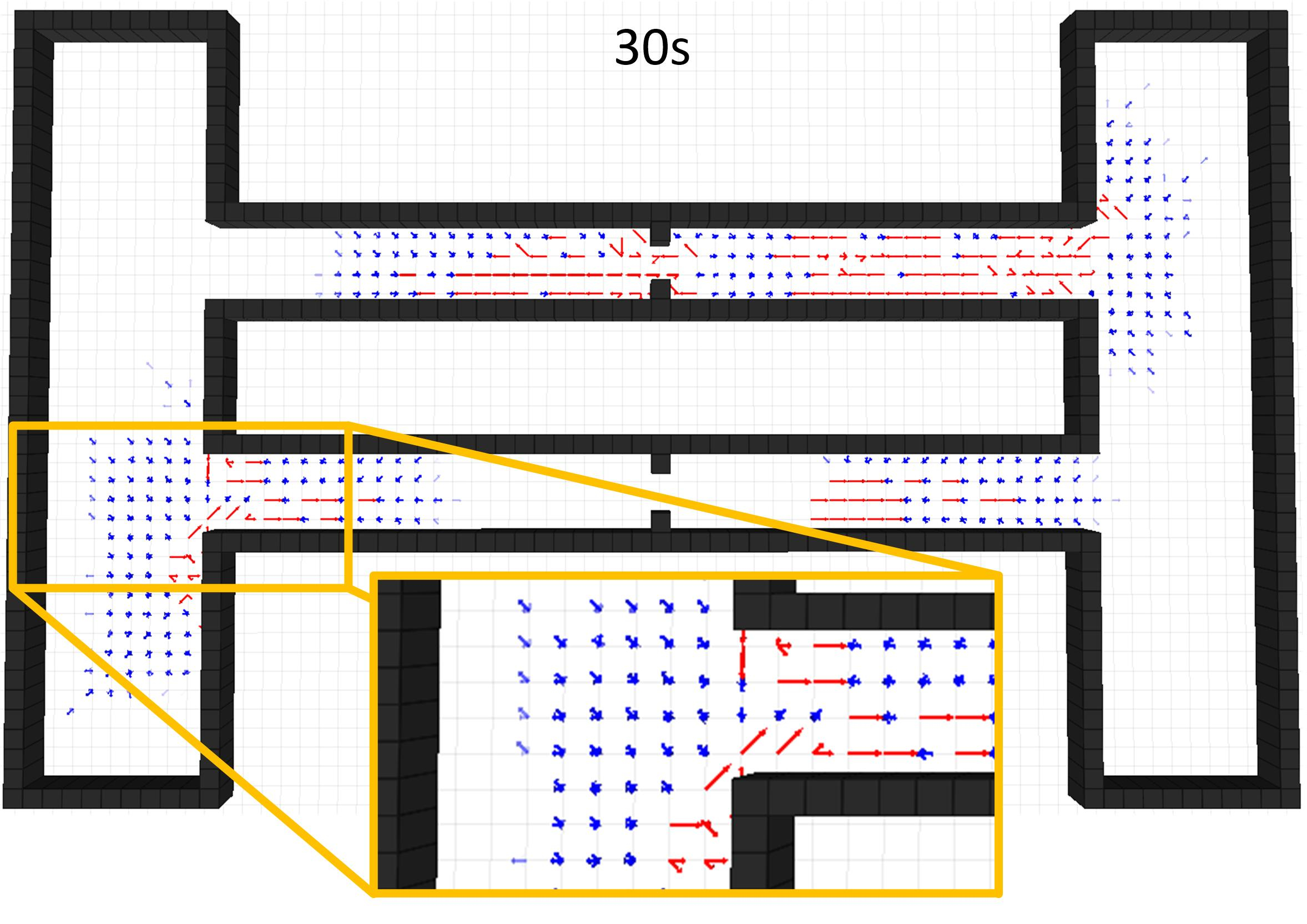
In order to deal with robot navigation in dense human populated environments, eg. in flows of humans, we started to investigate the problem of mapping these flows. The challenge is to build such a map from robot perceptions while robots move autonomously to perform some tasks. We developped a counting-based grid model which computes likelihoods of human presence and motion direction in each cell, see red vectors in Fig. 14.a (this is a statistical learning of repetitive human motions). We extended the flow grid model with a human motion predictive model based on the Von Misses motion patern, allowing to "accelerate" the flow grid mapping, see blue vectors in Fig. 14.a.
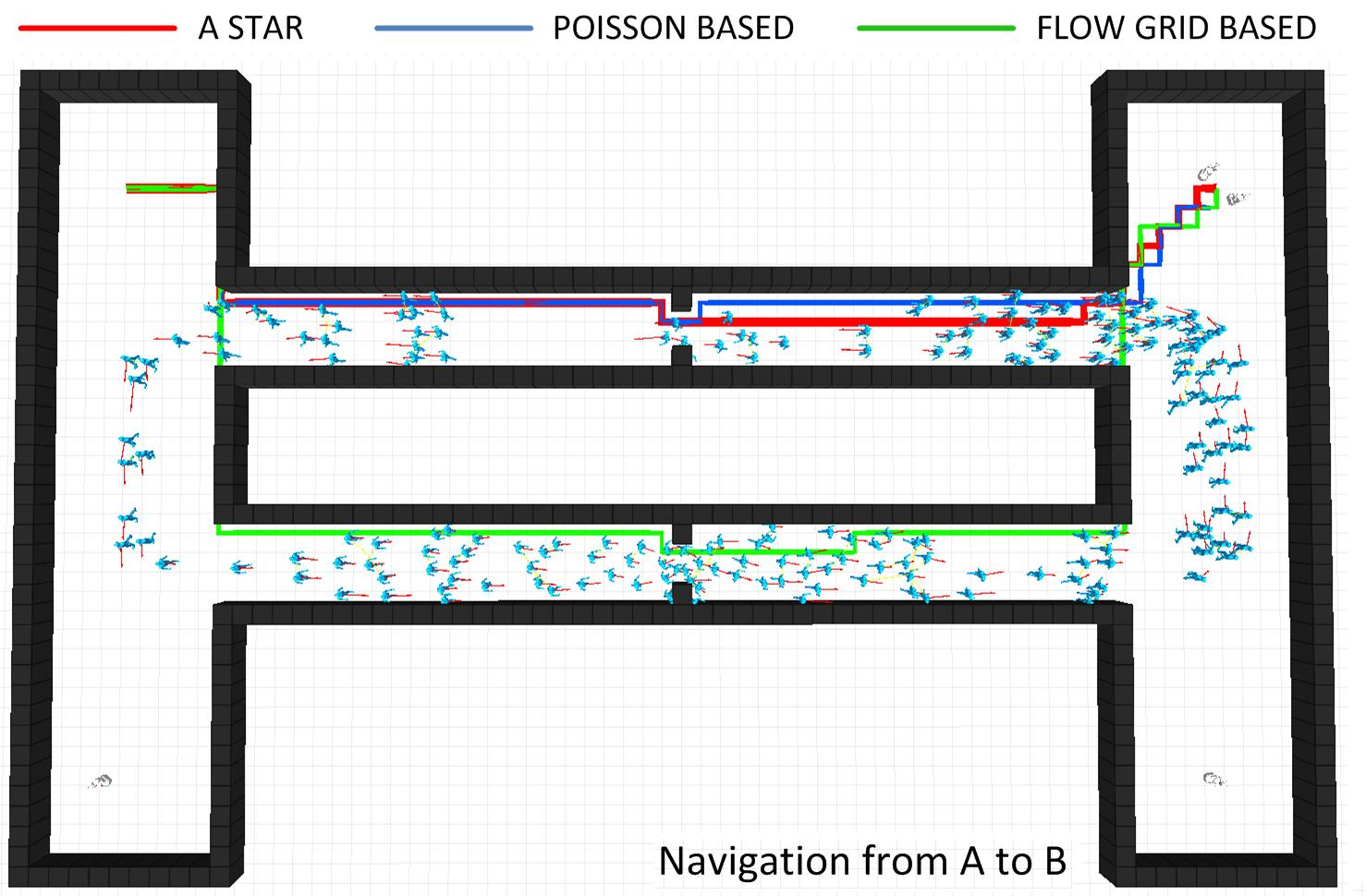
Then we explored how path-planning can benefit of such a flow grid, that is taking into account the risk for a robot to encounter humans in opposite direction. We first implement the Flow-Grid model in a simulator built upon PedSim and ROS tools, allowing to simulate mobile robots, crowd of pedestrians and sensors to detect their motion. Then, we compared three A*-based path-planning models using different levels of information about human presence: non-informed, a grid of human presence likelihood proposed by Tiplaldi [95] and our grid of human motion likelihood. Simulations involving 200 moving persons and 4 collaborative robots allowed to test simultaneously the mapping of human motions and the related path-planning. The different kind of paths obtained are illustrated in Fig. 14.b, showing the ability of the flow-grid based A* to avoid to cross areas with a possible opposite human flow. These results have been presented at RSS workshop DEMUR [30].
We also started some experiments with our mobile indoor robots (incl. the Pepper) in human populated environments, see [30]. We plan to demonstrate the efficiency of the approach by participating to the new Pepper-league of the Robocup@Home competition, over the future period 2017-2020.
Navigation of telepresence robots
Participants : Olivier Simonin, Anne Spalanzani, Gerard Bailly [GIPSA, CNRS, Grenoble] , Rémi Cambuzat.
In 2016 we obtained with the team of Gérard Bailly, from GIPSA/CNRS Grenoble, a regional support for the TENSIVE project. It funds the PhD thesis of Remi Cambuzat on immersive teleoperation of telepresence robots for verbal interaction and social navigation, started in October 2016. Chroma is focusing on the problem of social navigation, and more paricularly on the balance between human commands and autonomous navigation. Two issues are adressed : how to understand the expected direction given by the pilot to the teleprence robot, in order to ease the workload of the pilot ? how to assist the navigation, from embedded processes and sensors on the robot, while following the expected behavior given by the remote pilot ?
First months of the thesis concerned the building of a specific state-of-the-art, the formalization of some experimental scenarios, and the study of the Pepper robot capabilities in this scientific challenge.